8. Decision model
The Model class (osdi:Model) is the central container for the entire HTA simulation. A user may create different models using the same individuals from the ontology. Individuals are then linked to the model by using the property osdi:includesModelItem.
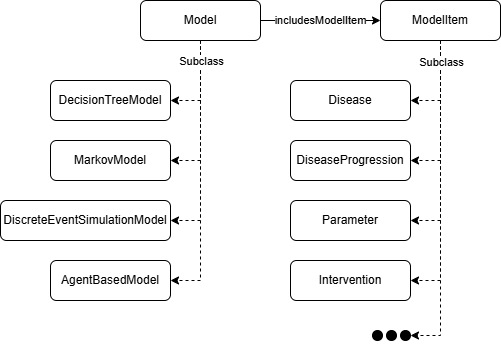
Currently, OSDi includes four modeling paradigms: decision trees (osdi:DecisionTreeModel), Markov (osdi:MarkovModel), discrete event simulation (osdi:DiscreteEventSimulationModel) and agent-based (osdi:AgentBasedModel).
The BD analysis is structured as a decision tree model.
TTL Example (A decision tree model for the screening of BD):
osdi:BD_DecisionTreeModel
a osdi:DecisionTreeModel ;
rdfs:label "Decision tree model for BD"@en ;
osdi:hasDescription "Decision tree model for newborn screening of biotinidase deficiency. It compares two strategies: (1) newborn screening for biotinidase deficiency with confirmatory testing and biotin treatment, and (2) no newborn screening (clinical detection only). " ;
osdi:includesModelItem osdi:BD_Disease , osdi:BD_Seizures , ... , osdi:BD_ManifestationSet , osdi:BD_InterventionNoScreening , ... .